| 遙感數(shù)字圖像處理教程復習整理 | 您所在的位置:網(wǎng)站首頁 › 屬馬7點到9點出生屬什么五行 › 遙感數(shù)字圖像處理教程復習整理 |
遙感數(shù)字圖像處理教程復習整理
|
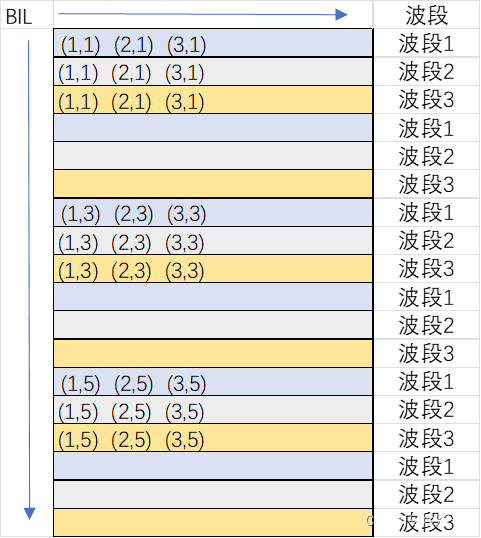
目錄 01 說明 遙感影像的存儲方式 BSQ方式 BIL方式 BIP方式 如何計算圖像存儲空間大小(字節(jié)數(shù))? 簡單的單位換算 計算公式 簡單地 復雜地 如何查看影像的基本信息/輔助信息? 如何進行直方圖的閾值分割? 輻射校正 系統(tǒng)輻射校正 是什么 怎么做 為什么要做 輻射定標 是什么 怎么做 為什么要做 大氣校正 是什么 怎么做 為什么要做 地表輻射校正(地面輻射校正) 是什么 怎么做 為什么要做 輻射校正和輻射增強區(qū)別 輻射校正的原因、誤差是什么 輻射校正和大氣校正之后我們會得到一個什么樣的數(shù)據(jù)?得到這個數(shù)據(jù)之后還要做一些什么工作? 幾何校正 是什么 怎么做(方法) 多項式模型中控制點的個數(shù)如何求取? 控制點如何選取?原則是什么? 為什么要做 什么時候做 圖像變換 傅里葉變換 波段運算 K-L變換 K-T變換(纓帽變換) K-L變換和K-T變換的特征以及如何區(qū)分? 最近鄰內(nèi)插和雙線性內(nèi)插怎么計算? 最近鄰內(nèi)插 雙線性內(nèi)插 彩色變換 圖像濾波 對比度計算 輻射增強-直方圖匹配(直方圖規(guī)定化)和直方圖均衡化 是什么 使用條件 小知識點 空間域中的平滑去噪-中值濾波+均值濾波的計算 邊緣增強 圖像分割和圖像分類 圖像分割的作用 圖像分割的計算方法 灰度閾值法 梯度方法 區(qū)域方法 數(shù)學形態(tài)學方法 遙感影像的地物分類,如何判斷特征空間分成幾類地物? Kappa系數(shù) 監(jiān)督分類和非監(jiān)督分類的常見算法及其特征 監(jiān)督分類 非監(jiān)督分類 分類結果的改善 遙感數(shù)字圖像處理課程包含了哪幾塊的內(nèi)容(思考題) 01 說明由于資料在word中,搬運中存在格式混亂。 上機及上機考試占50% 期末考試占50% 選擇題10題-每題2分 判斷題5題-每題2分 簡答題兩題-每題15分(每題3~4問) 計算題一題 概述題一題 遙感影像的存儲方式 BSQ方式存儲方式:BSQ(Band sequential)是像素按波段順序依次排列的數(shù)據(jù)格式,即先按照波段順序分塊排列,在每一個波段塊中,再按行列順序進行排列。逐波段存儲(BSQ)保證了像素空間位置的連續(xù)性,有利于圖像空間分布信息的顯示與處理。
存儲方式:像素先以行為單位分塊,在每一個塊中,按照波段順序進行像素排列,同一行不同波段的數(shù)據(jù)保存在一個數(shù)據(jù)塊中。逐行存儲(BIL)兼顧了圖像空間分布信息與像元光譜信息的顯示與處理。
存儲方式:以像素為核心,同一像素不同波段數(shù)據(jù)保存在一起,打破了像素空間的連續(xù)性。每一個塊為當前像素不同波段的像素值。逐像元存儲(BIP)有利于圖像元光譜信息的顯示與處理。
1B = 8b 關鍵在于此,B表示字節(jié)數(shù)(亦稱之為Byte);b表示比特(亦稱之為bit) 1KB = 1024 B 1MB = 1024KB 計算公式 簡單地一幅影像的所需比特數(shù)b = r * s * k; 其中,r表示影像行數(shù)(raw),s表示影像列數(shù)(sample),k為量化位數(shù),與影像的灰度級數(shù)相關,即L = 2k(例256 = 28)。 故一幅影像的字節(jié)數(shù): ?????????????????????????????????????????? 上述公式1024需要修改為8,這是編輯錯誤。? ?例如:一幅600行800列像元級數(shù)為256的遙感影像的存儲空間大小為: 600 * 800 * 8 = 3840000 bit = 480000 B = 468.75 KB 復雜地或者說,標準地,我們圖像文件大小地計算應如下:
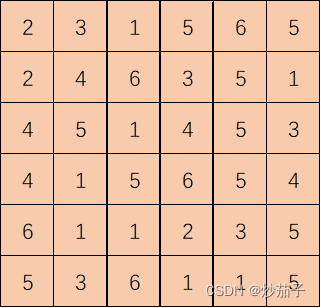
在該公式中,文件大小的單位為B(字節(jié)數(shù))。其中,每一個像素的字節(jié)數(shù)與前文的k不同,k表示每一個像素的比特位數(shù),二者之間的關系其實就是: ????????????????????? 例如灰度量化級數(shù)為0~255,那么共有256=28,我們需要使用8位二進制數(shù)才可以表示0~255的任意數(shù)值。因此比特位數(shù)位8,由于單位換算,8bit=1b,因此每一個像素所占字節(jié)數(shù)為1,每一個像素的比特位數(shù)位8。 而對于輔助參數(shù),一般題目給定,若不給定,默認為1即可。 如何查看影像的基本信息/輔助信息?如果不是原始的遙感影像,而是ENVI標準格式的文件,那么在頭文件(.hdr)中可以進行查看; 更多地,如果是原始地遙感影像,一般是有輔助文件,但是不同衛(wèi)星的輔助文件各不相同,對于Landsat影像,其輔助文件為*_MTL.txt文件;對于環(huán)境衛(wèi)星,輔助文件為.XML文件;對于Modis,其更多鑲嵌在HDF文件的屬性、波段中; 當然。或許我們會將這些包括圖像獲取的日期和時間(一般會存在兩個時間,一個是影像拍攝的時間,另外一個是影像拍攝后在地面站進行預處理制作成產(chǎn)品(也就是現(xiàn)在你手頭上的這個文件)的時間)、投影參數(shù)(例如基準面、仿射變換參數(shù)等)、幾何糾正精度、幾何分辨率(例如30m分辨率)、輻射校正參數(shù)(一般是輻射定標所需要的系數(shù)和偏置)等的輔助文件統(tǒng)一稱之為元數(shù)據(jù)。 如何繪制影像的直方圖?繪制前,我們講講直方圖的概念,直方圖是灰度級的函數(shù),描述的是圖像中各個灰度級的像素個數(shù)。其依據(jù)圖像像素的灰度級范圍,以橫軸為灰度級,以縱軸表示每一灰度級具有的像素數(shù)或者是該像素占總像素的比例值。 現(xiàn)在以隨機生成的一張影像為例說明直方圖的繪制。
說明:上述影像中,每一個表格表示一個像元,表格上的數(shù)值表示該位置像元值。 首先,我們需要統(tǒng)計各個數(shù)值出現(xiàn)的頻數(shù),統(tǒng)計如下:
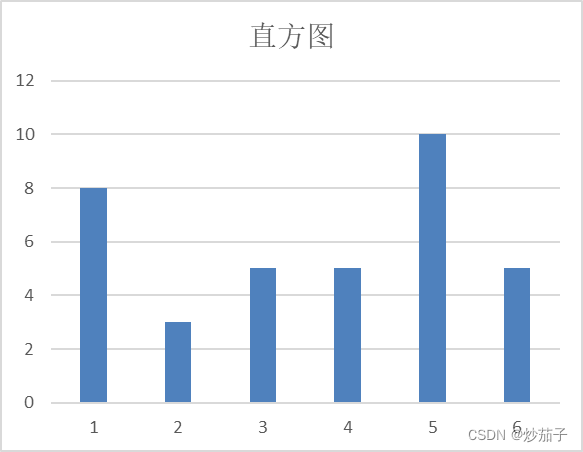
繪制的直方圖如下:
首先,我們需要明白圖像分割是什么? 一幅圖象通常是由代表物體的圖案與背景組成,簡稱物體與背景。若想從一幅圖象中“提取”物體,可以設法用專門的方法標出屬于該物體的點,如把物體上的點標為“1”,而把背景點標為“0”,通過分割以后,可得一幅二值圖象。 例如,我們想要提取一幅影像中的云,那么云就是代表物體的圖像,其余均為背景,這實際上就是一個二分類。 而直方圖的閾值分割的原理就是,我們要提取的物體與其它背景是存在差別的,這種差別在直方圖上就是灰度值的分布不同。 例如下方:
當我們想要圖像中的水體提取出來時,我們通過計算NDWI指數(shù)并繪制了直方圖如上。我們知道,NDWI指數(shù)高的的位置更有可能為水體,因此我們有理由懷疑右側小波峰處大概率為水體,而其它位置特別是左側的波峰我們認為它是背景,那么將二者區(qū)分開來自然就是在中間切一刀。 切一刀就是在直方圖上進行閾值分割,例如這里閾值為0.18,因此我們將 像元灰度值(NDWI指數(shù))小于0.18認為是背景,像元灰度值(NDWI指數(shù))大于0.18的像元認為是水體,如此實際上就是對圖像進行了二值化處理,也就是我們常說的重分類。 總而言之,我們使用直方圖進行閾值分割,一定是在波谷進行閾值分割,而不是在波峰進行閾值分割,這是常識。 如何繪制某一波段的光譜曲線?似乎表述有錯誤?若按ENVI中光譜曲線的繪制 若有多個波段,那么可以繪制Z光譜曲線,即某一像元不同波段(波長)的像元折線圖è光譜曲線圖;如下:
若是僅有一個波段,那么可以繪制水平方向上的光譜曲線;
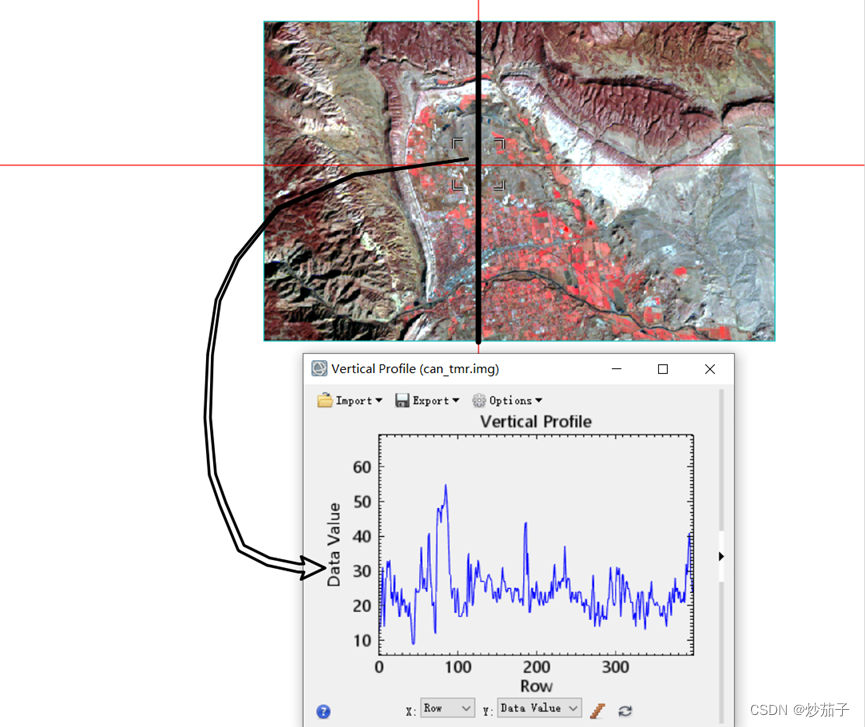
也可以繪制垂直方向上的光譜曲線:
至于某一波段的光譜曲線如何繪制,這里暫無。 輻射校正首先說說輻射校正的整個流程吧。 我整理了一些,大致流程應如下:
首先,由于衛(wèi)星上本身系統(tǒng)例如傳感器光學器件等造成的系統(tǒng)誤差,我們需要進行消除,這一部分在地面站點已經(jīng)進行了處理,一般不需要用戶進行處理除非改進。 接著,我們?nèi)羰悄玫揭患壆a(chǎn)品等,(有時)我們需要對影像進行輻射定標,這一步實際上就是將傳感器中接收的電信號(DN值,像素值的通用術語是數(shù)字量化值或DN值,它通常被用來描述還沒有校準到具有意義單位的像素值。)轉化為有實際意義的輻射亮度或者反射率等(注意此處均是大氣頂部的測得的數(shù)值即包含了大氣的影響);為什么說它包含了大氣的影響呢?因為此時的影像僅僅是地表目標物輻射的能量經(jīng)過大氣到達傳感器被其接收而得到的影像,而我們此處的輻射定標也僅僅是將這些能量進行簡單的變換,而能量本身并不是地物本身輻射的能量了。例如,我們有一個小人A,輻射的能量是100J,經(jīng)過大氣之后,存在大氣散射,可能消失了20J,最終到達傳感器的能量就是80J了,我們假定影像上某一像元位置即是該小人A的值80J,那么我們輻射定標實際上就是將該80J轉化為反射率例如0.4.但是其本質上還是包含了大氣的影響。此處省略了其它成分,僅僅著重展示了大氣在其中扮演的角色。 接著,由于我們知道了大氣對我們影像產(chǎn)生的影響,因此我們嘗試去消除大氣影響例如大氣散射而導致的一些誤差,這種過程就稱之為大氣校正。由于大氣校正本身原理比較復雜,這里不進行說明。 進行完大氣校正之后,一般我們就可以拿來使用了。而至于此處的地面輻射校正,其實基本上我是沒有做過的,一是有一些數(shù)據(jù)沒有相關參數(shù)例如太陽高度角等,二是沒有相關教程說明(甚少),或許在地面站點就已經(jīng)做過了也不一定。另外需要注意,此處進行由于地形起伏引起的校正實際上還是針對像元值進行的輻射校正而非對像元位置的校正。 系統(tǒng)輻射校正 是什么對傳感器成像系統(tǒng)造成的系統(tǒng)誤差進行的粗校正稱之為系統(tǒng)輻射校正。 怎么做對光學鏡頭的非均勻性引起的邊緣減光現(xiàn)象進行校正; 對由檢測器等引起的壞線和條紋進行修復; 通過域值法識別壞像元,并通過平滑作以進行斑點的修復; 為什么要做因為影像存在邊緣減光現(xiàn)象、條紋壞線、斑點等問題時,會對影像目視解譯等產(chǎn)生影響。 輻射定標 是什么輻射定標一般而言是將傳感器記錄的電壓或數(shù)字量化值(DN值)轉換成輻射亮度、反射率等遙感物理量的過程。 怎么做理論公式復雜,我們直接使用實的公式: ?
或者: ?????????? 以上公式中的增益系數(shù)、偏置、最小最大值等一般僅針對影像中某一波段而言,因為不同波段的計算公式參數(shù)不同。 為什么要做為了消除傳感器本身的誤差,確定傳感器入口處的準確輻射值,將DN值轉換為輻射亮度值、反射率值和溫度等物理量 大氣校正 是什么消除由大氣散射等引起的輻射誤差的處理過程稱之為大氣校正。 怎么做對于可見光和近紅外波段,我們使用ENVI的Flaash等模塊進行大氣校正; 對于熱紅外波段,由于我們不需要考慮大氣的散射而考慮其吸收和發(fā)射,因此我們使用ENVI的Thermal Atm Correction等進行熱紅外波段的大氣校正。 為什么要做消除大氣和光照等因素對地物反射的影響,獲得真實地表反射率、輻射率、地表溫度等真實物理模型參數(shù)。 地表輻射校正(地面輻射校正) 是什么地面輻射校正包括太陽輻射校正和地形輻射校正。 太陽輻射校正的目的是通過將太陽光線傾斜照射時獲取的圖像校正為太陽光線垂直照射時獲取的圖像。(主要用于比較不同太陽高度角的圖像,消除不同地方、不同季節(jié)、不同時期圖像之間的輻射差異,通常通過調整圖像的平均亮度加以實現(xiàn)。) 地形輻射校正的目的是消除由地形引起的輻射亮度誤差,使坡度不同但反射性質相同的地物在圖像中具有相同的亮度值。 (鏈接:https://www.zhihu.com/question/438245884/answer/2349543187) 怎么做無 為什么要做消除由太陽高度角等和地形起伏引起的輻射亮度誤差。 輻射校正和輻射增強區(qū)別輻射校正是一種預處理步驟,其目標是去除影像中由于傳感器特性、觀測條件和大氣效應等非地表目標因素引起的輻射畸變,從而獲取地表真實的反射率或輻射亮度。輻射校正包括系統(tǒng)輻射校正、輻射定標、大氣校正、地面輻射校正(太陽輻射校正和地形輻射校正)等步驟。 輻射增強則是一種后處理步驟,其目標是通過調整影像的灰度級別,提高影像的視覺質量和解譯效果。輻射增強的方法通常包括直方圖均衡化、直方圖規(guī)定?、線性拉伸、非線性拉伸等,它們可以改變影像的對比度和亮度,使得人眼或計算機更容易從影像中提取信息。 所以,輻射校正和輻射增強的主要區(qū)別在于,前者試圖恢復地表的真實輻射信息,而后者試圖改善影像的視覺效果,使得信息更容易被解讀。 輻射校正的原因、誤差是什么由于傳感器自身的因素(比如傳感器老化、暗電流、損壞像元等,都可能引起影像輻射信息的誤差)以及大氣狀況(地球大氣會吸收和散射來自地表的太陽輻射,這會影響衛(wèi)星接收到的輻射值)、太陽位置(不同的觀測角度和太陽高度角會使得同一地物的反射率或輻射亮度表現(xiàn)不同)、地形起伏(地形因素例如坡度坡向導致影像輻亮度的變化)等外界因素,使得目標物反射或發(fā)射的能量與傳感器的測量值存在差異。 輻射校正和大氣校正之后我們會得到一個什么樣的數(shù)據(jù)?得到這個數(shù)據(jù)之后還要做一些什么工作?這里沒有找到相關的解答。那就隨便答吧。 首先,要明白這里的輻射校正應該是老師口誤,因為至少在國內(nèi)的教材中輻射校正大多包含了輻射定標、大氣校正等;但是我們在進行一些數(shù)據(jù)集特別是國外數(shù)據(jù)集的下載中,常常引發(fā)一些錯誤,因為國外的Radiometric calibration(實際上其為輻射定標)有時翻譯為輻射校正,而Radiometric correction(實際為輻射校正)也翻譯為輻射校正。也有的數(shù)據(jù)集的介紹進行混用,這會導致一些混亂。當然,也有一些人不滿教材中如此闡述,不過已是大勢所趨了。 因此應該是進行輻射定標和大氣校正后,我們會得到一個什么樣的數(shù)據(jù)?對于這個數(shù)據(jù)之后還要進行哪些工作? 首先,我們得到的數(shù)據(jù)是關于真實地表反射率、輻射率、地表溫度等遙感物理量的影像。 得到這個數(shù)據(jù)之后我們需要對影像進行幾何校正。 幾何校正 是什么幾何校正是指消除或改正遙感影像幾何誤差的過程。 怎么做(方法)幾何校正包括正射校正、幾何粗校正(地面站點就已完成)、幾何精校正(幾何配準、地理配準等均是指代其)。 當然應該也包括重采樣,這其實也就解釋了為什么我們是先做輻射校正然后再進行幾何校正。原本二者本無任何關聯(lián),輻射校正解決的是像元值的問題,而幾何校正解決的是像元位置的問題,進行輻射校正僅僅只會對影像中各個像元的像素值進行變換,而不會對像元位置進行變換。但是問題就在于此,我們在進行幾何校正之后,由于進行了重采樣(因為像元位置發(fā)生了變化,可能存在有一些位置處空缺像元,因此需要重采樣),那么就會導致像元值發(fā)生變化。當然,影響也不是特別大,你想要反著來作也不會有太大的影響,但是大家都這么作,而且確實事出有因那就沒有必要如此。 多項式模型中控制點的個數(shù)如何求取?既然老師強調多項式模型,也強調了幾何校正如何去做,那么我們就通過多項式模型了解幾何校正的大致原理,當然最重要的還是控制點的個數(shù)如何求取,畢竟這是考試。我們知道,幾何校正的本質就是將像元校正到正確的位置上去。 那么多項式模型如何解決這個問題呢?
那么,問題在于,怎么得到? 對于一次項模型(最高階是1),我們的式子應如下: ??????????
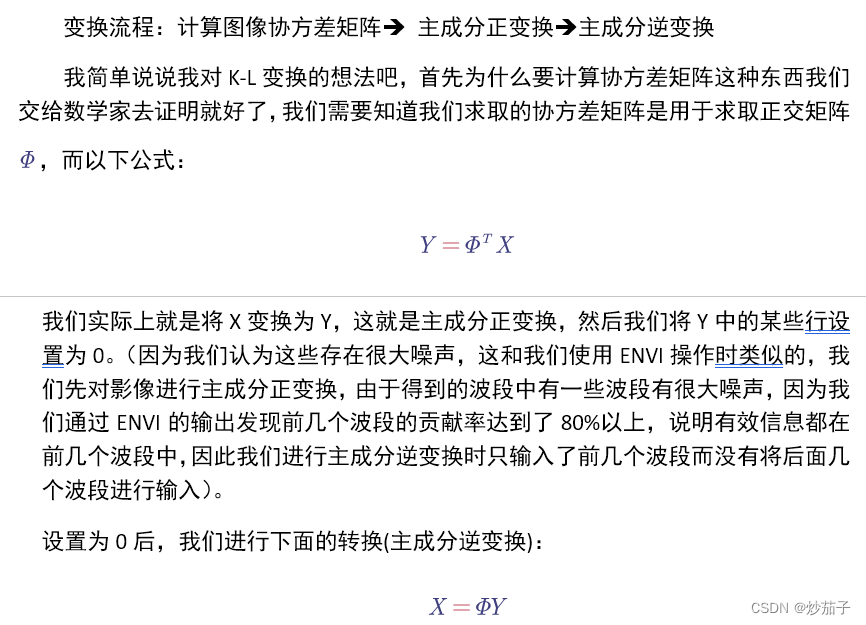
???????????????????????????????????????????????? 控制點如何選取?原則是什么? 控制點應選取圖像上易分辨且較精細的特征點,如道路交叉點、河流彎曲或分叉處、湖泊邊緣、飛機場、城廓邊緣等地面控制點上的地物不隨時間而變化,以保證當兩幅不同時段的圖像或地圖幾何糾正時,可以同時識別出來特征變化大的地區(qū)應多選一些圖像邊緣部分一定要選取控制點,以避免外推盡可能滿幅均勻選取 為什么要做因為影像在成像過程中像元位置會受到以下方面的影響,造成影像發(fā)生幾何畸變,因此需要通過幾何校正將像元校正到正確的位置。 傳感器成像方式引起的圖像變形;傳感器外方位元素變化的影響;遙感平臺位置和運動狀態(tài)變化的影響: 航高、航速、俯仰、翻滾、偏航;地形起伏影響而產(chǎn)生的像點位移;地球表面曲率的影響:一是產(chǎn)生像點位移;二是像元對應于地面寬度不等,距星下點愈遠畸變愈大,對應地面長度越長;大氣折射的影響:產(chǎn)生像點位移;地球自轉引起的變形;通過對各個影像進行幾何校正,保證不同圖像間的幾何一致性 什么時候做當需要將來自不同日期、傳感器、平臺、高度、視角等的遙感影像進行對比、融合、疊置分析等時,需要進行幾何校正,以使所有影像在空間上對齊保證不同圖像間的幾何一致性 特別地,對于幾何校正中地正射校正,一般在高分辨率影像需要進行(特別使亞米級)。 圖像變換 傅里葉變換不會具體考,只需要知道傅里葉變換是什么? 傅里葉變換是圖像處理中一種有效而重要的方法,可用于圖像特征提取、頻率域濾波、周期性噪聲去除、圖像恢復、紋理分析等。 波段運算類似柵格計算器,不進行闡述。 K-L變換
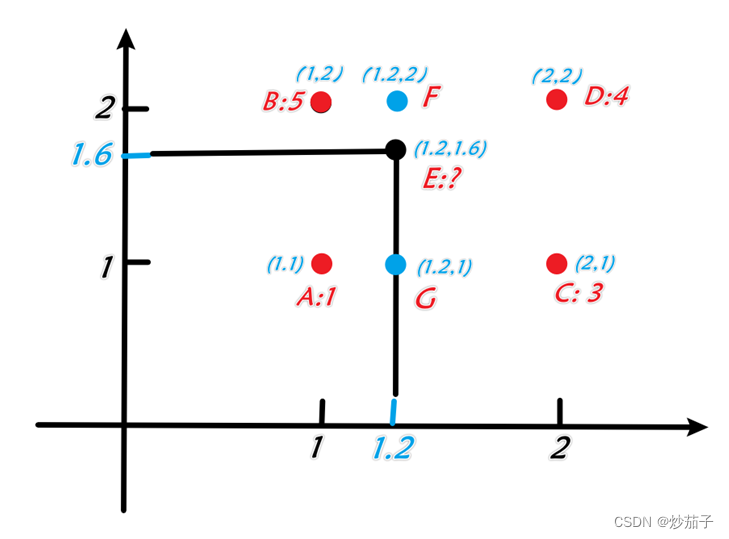
? ? ? ? ? ?就可以得到K-L變換之后的影像了。當然,你或許會問,你前面說舍去某些行,可是我的影像是一個二維的,確實,事實上我們是將二維影像一維化,例如,我們有6個波段的一張影像,那么: ???????????????????????????????????????????????? X一共6行表示6個波段的信息,進行主成分正變換得到Y,進行一些取舍之后(例如將后面三行全部變?yōu)?),再進行主成分逆變換得到新的X。那么現(xiàn)在的X就是去除了很多噪聲的6波段影像。 在Y中,我們稱一行就是一個主成分分量,我們根據(jù)Y的協(xié)方差矩陣可以知道各個分量的有效信息,如此進行取舍。 K-T變換(纓帽變換)K-T變換實際上就是一種特殊的K-L變換,我們進行k-L變換可以得到最好的變換,就是在最大程度上將噪聲或者說冗余部分去除了,但是我們K-L變換之后得到的各個分量卻沒有特別的含義或者說沒有什么可比較性。 但是K-T變換在K-L的變換上進行了改進,K-T變換得到的各個主成分分量具有一定的景觀含義。 對于Landsat MSS傳感器而言: 第一個分量是亮度分量,是土壤反射率變化的方向; 第二個分量是綠色物質分量(綠度),反應植物的生物量狀況; 第三個分量是黃色物質分量(黃度);反應植物的枯萎程度; 對于Landsat TM和ETM+傳感器而言: 第一個分量是亮度,反應總體反射值(與MSS不同); 第二個分量是綠度,類似; 第三個分量是濕度; 不同的傳感器,衛(wèi)星的含義不盡相同。 至于纓帽變換的特征是什么?上面三個分量代表的含義需要謹記;另外就是它獨立于影像,對于同一傳感器其變換系數(shù)(就是我們前面講的 這里需要注意,對于K-L變換,每一張影像的變換矩陣( 如果說還有區(qū)別,那就是二者得到的分量,對于K-L變換得到的分量很難具有一定的特殊含義或比較含義;而對于K-T變換得到的三個分量具有明確的物理意義(例如我們可以利用第二和第三分量進行植被和水體信息的提取); 最近鄰內(nèi)插和雙線性內(nèi)插怎么計算?以題為例: 若f(1,1)=1, f(1,2)=5, f(2,1)=3, f(2,2)=4, 分別按照最近鄰插值法、雙線性插值法確定點(1.2,1.6)的灰度值 最近鄰內(nèi)插最近鄰算法:要插值的像元點的值為距離其最近的已知像元的值。 在此題中,我們假定A(1,1)、B(1,2)、C(2,1)、D(2,2)、E(1.2,1.6),那么 ??????????????????????????????? 可以發(fā)現(xiàn),需要插值像元E(1.2,1.6)與已知像元B距離最近,因此我們認為E點(1.2,1.6)的灰度值為B點的灰度值即5。 雙線性內(nèi)插有一點難這種算法,但是理解了就還好。其實就是進行了兩次一次線性插值。 還是剛剛那道題(假設不變),我們一點一點剖析,如果我們知道了以下兩個藍點(F、G)的像元值,那么對于要插值的像元E我們是不是有一點思路了?
假定我們已知F點和G點的灰度值(不如稱之為f(F)、f(G)),另外我們假定從F點到G點的灰度值是線性變化的,那么它灰度的線性變化不就是按照距離由大到小或者由小到大嘛,而我們要的E點就在其中,如此我們不是可以得到E點的灰度值? 一句話就是該點的值= 該點在橫軸或者豎軸鄰近小的那個點(坐標小的那個)的距離與該點在橫軸或者縱軸相鄰兩點的距離的比值 * 相鄰兩點的灰度值之差 + 某一點的灰度值,某一點看下面的公式自然一眼懂。 那么這個線性變化用公式如何去表達? ????????????????????????????? 如此可以計算出f(E)?的灰度值了。 那么問題來了,我如何求取F點和G點的灰度呢?類似的,我們還是進行如此計算,我就不詳細闡述了,公式如下: ???????????????????????????????????????????????????????????????????????? ?????????????????????????????????????????? 總共三個式子,三個未知數(shù): ???? 有的雙線性內(nèi)插喜歡這樣子計算: f(F)=5 + (4 - 5) * ((1.2 - 1) /(2 - 1)) = 4.8 f(G)=1 + (3 - 1) * ((1.2 - 1) /(2 - 1)) = 1.4 f(E) = 1.4 + (4.8 – 1.4) * ((1.6 - 1) / (2 - 1)) = 3.44 如果你熟練那么無所謂,不然還是列三個公式一步一步來,不過這個寫的也挺爽。 彩色變換這里掌握HSI模型,需要注意的是: 色調(Hue):描述了顏色的類型,如紅色、黃色、藍色等飽和度(Saturation):描述了顏色的純度,飽和度越高,顏色越鮮艷。亮度(Intensity):描述了顏色的亮度或明暗程度。至于顏色模型是什么分量變換,,,如果只是顏色模型之間的變換例如RGB轉HIS那么應該所有分量R、G、B三個分量都進行了變換;所以可能理解有誤,如果可能,應該是強調圖像融合的時候,若我們使用HSI變換,對于高分辨率單波段影像和低分辨率多波段影像,我們先將多波段影像的RGB轉化為HIS模型,然后將I(亮度)分量換成高分辨率影像的波段,然后再進行HIS逆變換,如此得到高分辨率的多波段影像。所以這里可能指代這個I分量。 圖像濾波圖像通過濾波和卷積進行圖像增強; 對比度計算考試使用四鄰域計算;掌握以下即可。
什么時候用直方圖匹配,什么時候使用直方圖均衡化,使用條件是什么? 是什么首先,需要明白,直方圖匹配、直方圖均衡化是什么,干什么用? 我們知道,他們是用于圖像的輻射增強,但是,怎么增強的? 實際上就是舊的灰度值映射到新的灰度值上,像我們之前學習的線性變換、分段線性變換、對數(shù)變換、指數(shù)變換均是如此。 而對于直方圖均衡化,我們是將各個灰度值的頻數(shù)均勻分配:
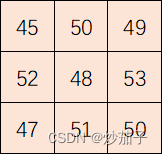
而直方圖規(guī)定化則是將其與另一幅圖象的直方圖匹配(與其形狀一致)或具有一種預先規(guī)定的函數(shù)形狀。 簡而言之,直方圖均衡化是將影像直方圖分布均勻化的方法;而直方圖規(guī)定化是將一幅影像與另一影像的直方圖匹配使二者直方圖形狀幾乎一致的方法(也稱直方圖匹配)。 使用條件直方圖均衡化通常用于當圖像的對比度較低,或者某一部分的像素值集中在較小范圍內(nèi)時。直方圖均衡化通過拉伸像素值范圍,使得每一個可能的像素值都能得到有效利用,從而提高對比度和細節(jié)可見度。 而直方圖規(guī)定化通常用于當需要將一幅圖像的灰度分布調整成與另一幅圖像相似的情況,如在遙感影像融合、影像拼接、影像色彩校正等任務中。直方圖匹配通過調整像素值的分布,使得兩幅圖像在視覺上具有相似的色彩和亮度特性。 小知識點 濾波可以在空間域或者頻率域進行;濾波的作用是平滑去噪和邊緣增強 空間域中的平滑去噪-中值濾波+均值濾波的計算我找一張很形象的動圖(一幅影像一個卷積核或者說算子,下方一共8個波段對應8個卷積核): 但是需要注意的是,上方的計算并沒有考慮邊緣部分的計算,以下我們以一個例題進行計算。 假定一幅一影像柵格矩陣如下:
由于我們需要考慮邊緣部分,因此擴充補零:
我們均值計算的卷積核或者說算子如下:
那么對于第一行第一列的數(shù)值,我們的計算如下: ?? 所以對于中心像元45應該替換為11.1111,對于其它像元均是如此計算。需要注意的是,并不是每一個均值計算都是計算中心像元的3?3窗內(nèi)所有像元值的和再除以9(常規(guī)均值的求取);一方面要注意窗口的大小,另一方面需要注意卷積核的樣子,均值計算的卷積核不止一種。 對于中值運算同樣如此,但是一般不需要實際數(shù)值的卷積核,因為中值實際上就是將窗口內(nèi)的數(shù)值由大到小排列取中間的數(shù)值替換中心像元的數(shù)值,但是需要注意它的窗口,不僅僅是窗口大小,更有窗口形狀的變換,例如1×3的卷積核,由于計算類似,細看 。 例如下方對于中心像元的中值濾波(濾波窗口為3×3):
簡單看看各種邊緣增強的卷積核或者算子的樣式:
樣式就是卷積核內(nèi)數(shù)值相加必等于0,且具有一定突出效果。 邊緣增強的卷積核的作用就是突出圖像中的地物邊緣、輪廓線或者線狀目標,提高了邊緣與周圍像素之間的反差。 平滑濾波就是我們說的低通濾波,邊緣增強也就是我們說的高通濾波; 低通濾波顧名思義就是低的可以通過,具體指代的是低頻部分可以通過,但是這里的低頻部分一般指代圖像的平滑和均勻部分,因為這部分區(qū)域的像素變化較慢或者變化較小;è常用于圖像平滑和噪聲去除。 而高通濾波顧名思義就是高的可以通過,具體指代的是高頻部分可以通過,這里的高頻成分一般指代圖像的邊緣和細節(jié)部分,因為這部分區(qū)域像素值變化較快或者變化較大。è常用于圖像銳化和邊緣檢測。 對頻率域來說,通過傅里葉變換將空間域變換到頻率域,然后在頻率域上進行高通濾波和低通濾波,需要特別注意的是,哪個是在頻率域中中間位哪個是在邊緣位置上進行濾波; 由于我們的拿到的影像一般如下(經(jīng)過頻譜居中):
中間部分亮只是因為它的能量比較多,也就是說影像中大部分區(qū)域都是低頻部分也就是比較平滑。 我們進行低通濾波實際上對頻譜圖像中心的區(qū)域進行處理(讓中間區(qū)域通過),而抑制或消除邊緣部分。 而高通濾波則是對邊緣部分進行處理。 圖像分割和圖像分類首先說說圖像分割是什么,了解一下,直接摘了: 一幅圖象通常是由代表物體的圖案與背景組成,簡稱物體與背景。若想從一幅圖象中“提取”物體,可以設法用專門的方法標出屬于該物體的點,如把物體上的點標為“1”,而把背景點標為“0”,通過分割以后,可得一幅二值圖象。 圖像分割的作用將一個圖像分割成若干個具有特定意義的區(qū)域,這些區(qū)域通常具有一致的某種屬性,如顏色、亮度或紋理等。 圖像分割的計算方法 灰度閾值法當影像直方圖具有兩個峰,分別與兩個灰度級范圍相對應 ,我們可以將分割閾值設置于兩峰之間的谷底,這樣能夠將目標物和背景分割。它適用于目標在其內(nèi)部具有均勻一致的灰度值并分布在另一個灰度值均勻的背景時。 或者說,圖像中的不同區(qū)域在直方圖上有不同的峰值。它適用于圖像的直方圖具有明顯的多峰特性,且不同峰值對應的像素值具有明顯的區(qū)分度也即相鄰兩峰間的谷對應于目標邊緣附近有相對較少數(shù)目的點時。 梯度方法梯度方法是基于圖像的邊緣信息來進行圖像分割,它適用于圖像中的目標區(qū)域和背景之間具有明顯的邊緣界限。 區(qū)域方法類似種子擴散算法,要求像素間具有一定的連通性和鄰近性,實際上就是需要有一定的相似度 數(shù)學形態(tài)學方法多用于二值化圖像(例如在對分類或者分割好的影像進行腐蝕膨脹去除小斑塊孤島問題等),當然灰度圖像也是可以的。 遙感影像的地物分類,如何判斷特征空間分成幾類地物?看圖說話:
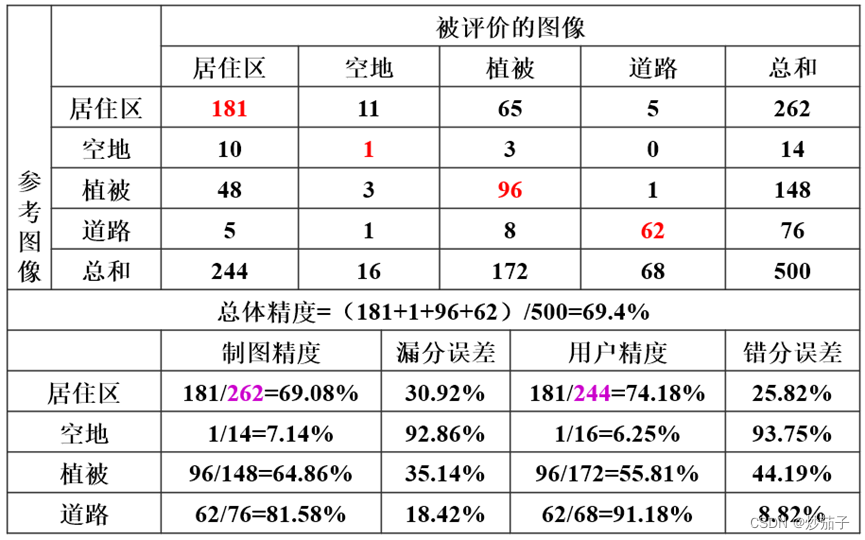
但實際上我們是通過距離(例如曼哈頓距離、歐式距離等)、相關系數(shù)、最大似然法等進行地物判斷。 精度評價方法及其計算?總體精度(Overall Accuracy):這是分類結果正確的樣本所占的比例。它表示了整體分類的準確性,但不能反映各類別間的精度差異。 制圖精度(Producer's Accuracy):也被稱為“用戶精度”,是一種針對每個類別的精度度量,它表示了被正確分類到該類別的樣本所占該類別所有樣本的比例。 漏分誤差(Omission Error):對某一類別,它是未被正確分類到該類別的樣本所占該類別所有樣本的比例,是制圖精度的補。 錯分誤差(Commission Error):對某一類別,它是被錯誤分類到該類別的樣本所占所有被分類到該類別的樣本的比例。 混淆矩陣(Confusion Matrix):它是一個表格,用于描述分類結果的詳細情況。行代表實際類別,列代表預測類別,表格中的元素表示各類別之間的樣本數(shù)量。 Kappa系數(shù)(Kappa Coefficient):Kappa系數(shù)是一種用于一種測定模型分類結果與實際影像吻合度或精度的統(tǒng)計量。值越接近1,表示分類結果越好;值為0表示預測分類結果與隨機結果無差異;值小于0表示分類結果比隨機結果還差。 混淆矩陣
特征:地物類型是確定的,有充足的參照數(shù)據(jù)作為訓練樣本,從訓練樣本得到解譯標志,并用于訓練分類器以將光譜數(shù)據(jù)分類制成專題圖。 非監(jiān)督分類 K-均值算法(K-mean)ISODATA算法(動態(tài)聚類法)特征:使用基于聚類的算法,根據(jù)圖像內(nèi)在包含的統(tǒng)計信息將光譜圖像劃分成許多光譜類別,沒有預先定義好的類,分析人員負責將各個光譜類別標明和合并為有意義的類別。 監(jiān)督分類有哪幾種常見算法?非監(jiān)督分類又有哪幾種常見算法?特征是什么,適用于什么樣的分類條件; 分類結果的改善 擴大樣本數(shù)量;剔除不純凈的樣本;選用不同的分類算法和相關參數(shù);影像的分辨率提升以及影像的預處理例如輻射定標、大氣校正等;了解地物分類的特征,嘗試增加更多特征,例如對于植被使用NDVI、NDWI等;對于不同地物的樣本,我們可以對其進行分離度分析來查看各類樣本的可分離性,若較為模糊就應該對樣本進行改進處理;對于分類效果好壞通過前文的精度評價中各項指標進行。 遙感數(shù)字圖像處理課程包含了哪幾塊的內(nèi)容(思考題) 遙感數(shù)字圖像處理的發(fā)展史遙感數(shù)字圖像的獲取、查詢和檢索、統(tǒng)計和特征、數(shù)據(jù)格式和存儲方式、顯示和拉伸圖像的輻射校正和幾何校正(輻射校正又包括系統(tǒng)輻射校正、輻射定標、大氣校正和地形輻射校正;而幾何校正又包括正射校正、幾何粗校正和幾何精校正;)圖像的增強(包括各種變換例如傅里葉變換、K-L變換、K-T變換,以及他們和卷積濾波的結合包括平滑去噪和邊緣增強兩個方面)圖像的分割和分類(分割包括各種分割算法例如灰度閾值法、數(shù)學形態(tài)學算法等;分類包括監(jiān)督分類和非監(jiān)督分類算法,具體又有隨機森林支持向量機等、ISODATA和K均值等) |

















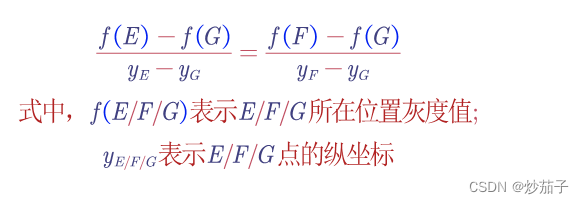

 最終結算E點的灰度值為3.44.
最終結算E點的灰度值為3.44.











 ?
?
【本文地址】
| 今日新聞 |
| 推薦新聞 |
| 專題文章 |