| 基于圓形標(biāo)定點(diǎn)的相機(jī)幾何參數(shù)的標(biāo)定 | 您所在的位置:網(wǎng)站首頁(yè) › 屬蛇的人2021年犯太歲嗎 › 基于圓形標(biāo)定點(diǎn)的相機(jī)幾何參數(shù)的標(biāo)定 |
基于圓形標(biāo)定點(diǎn)的相機(jī)幾何參數(shù)的標(biāo)定
|
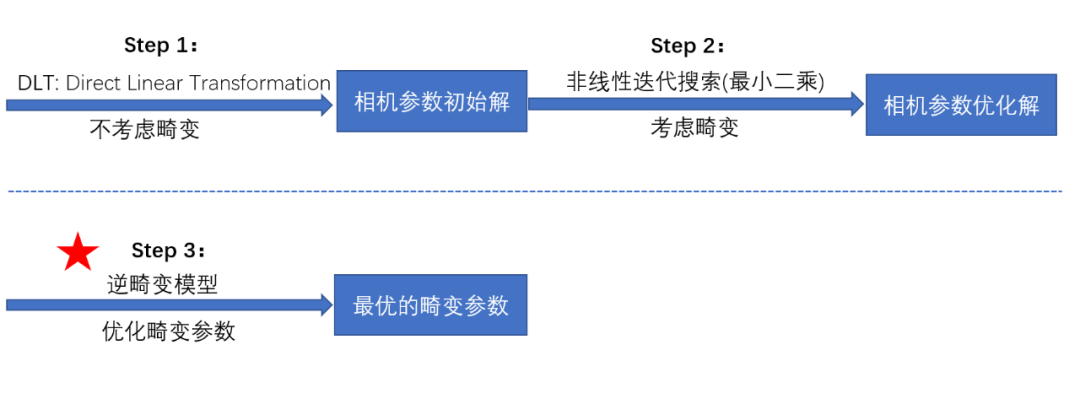
文章:Geometric camera calibration using circular control points? 鏈接:http://www.ee.oulu.fi/~jth/calibr/ 相機(jī)標(biāo)定可以歸納為P?n?P(Perspective-n-Point)的問(wèn)題,即已知三維物點(diǎn)坐標(biāo)和對(duì)應(yīng)的二維投影坐標(biāo),求解相機(jī)參數(shù)。由于鏡頭的畸變(徑向和切向)帶來(lái)非線性成像模型,一般求解方法分為兩步: 不考慮畸變,成像模型為線性模型,利用線性求解方法求出初始解 考慮畸變,利用初始解和成像模型對(duì)三維物點(diǎn)投影得到的投影點(diǎn)與觀測(cè)點(diǎn)形成最優(yōu)問(wèn)題, 通過(guò)最小二乘進(jìn)行估計(jì)。 這篇文章的精彩之處在于給出逆畸變模型,在上兩步的基礎(chǔ)上,利用逆畸變模型進(jìn)一步優(yōu)化畸變參數(shù)。 文章的主要框架內(nèi)容:
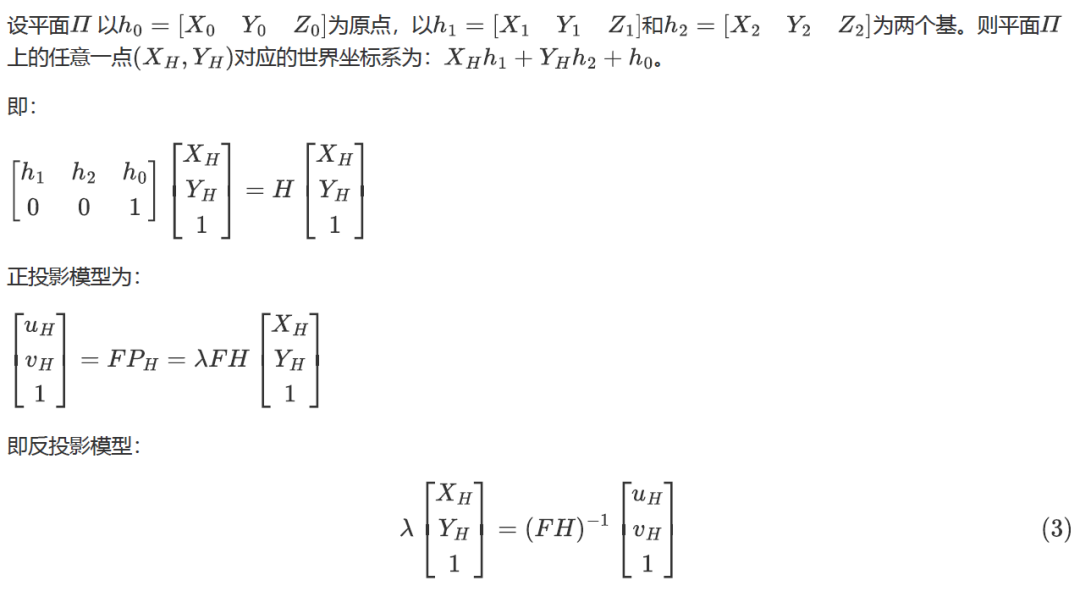
1.相機(jī)模型 1.1正投影模型 1.2反投影模型 1.3需要標(biāo)定的參數(shù): 2.圓形標(biāo)定點(diǎn)的偏差校正 3.逆畸變模型 3.1遞歸逆畸變模型 3.2非遞歸逆畸變模型: 4.利用逆畸變模型優(yōu)化畸變系數(shù) 5.驗(yàn)證逆畸變模型的精度 參考文獻(xiàn): 1.相機(jī)模型 1.1正投影模型
相機(jī)的內(nèi)參:
相機(jī)的外參:
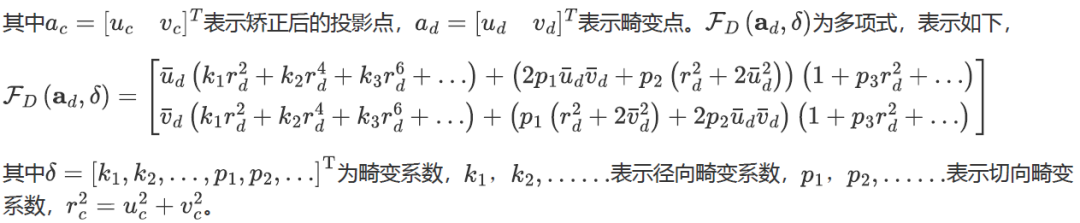
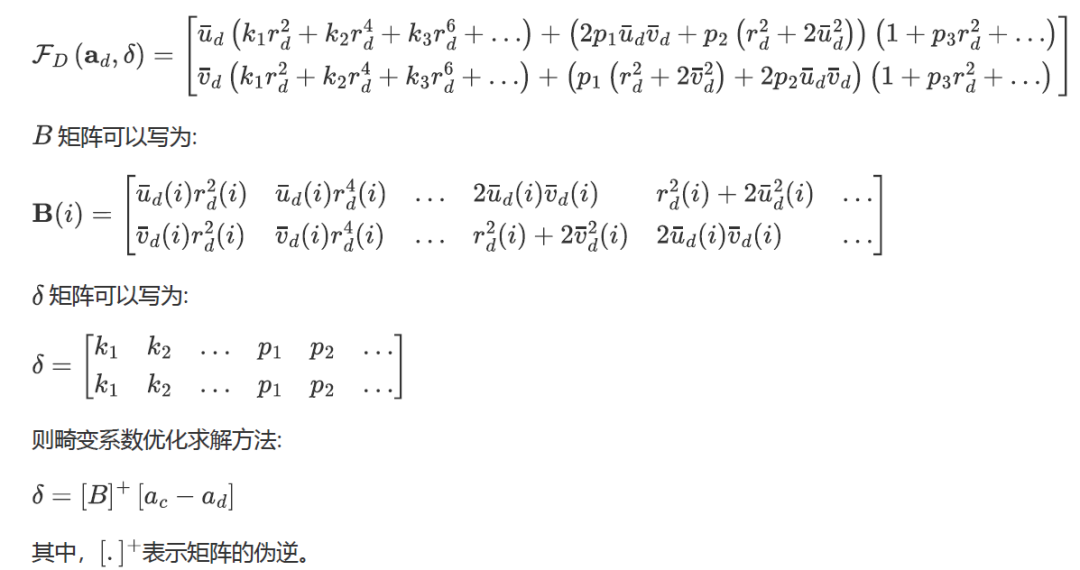
相機(jī)的畸變模型:
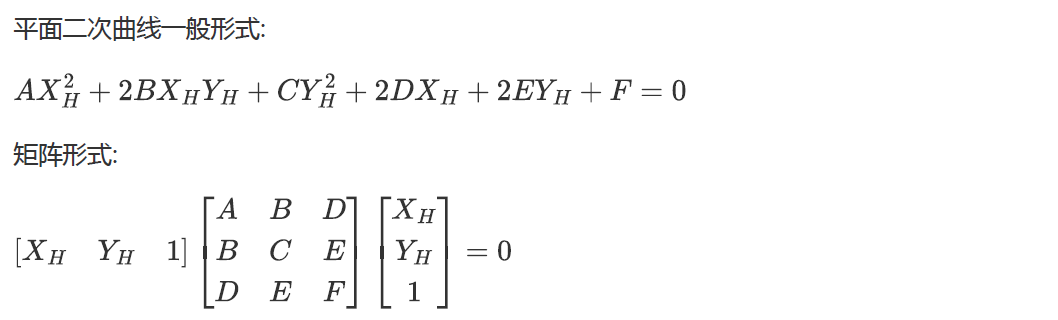
透視投影不是保形變換,直線在透視投影模型下為直線,一般二維或三維形狀與圖像平面不共面時(shí)會(huì)發(fā)生變形。常用的標(biāo)定板是棋盤格,棋盤格的角點(diǎn)是包型變換,但不易精準(zhǔn)檢測(cè)。圓形標(biāo)定板也是校準(zhǔn)中常用的標(biāo)志板,圓形可以準(zhǔn)確的找到中心點(diǎn),但通過(guò)透視投影圓心會(huì)發(fā)生偏差。
令: 則圓的表示形式: 得: 因?yàn)榉聪鄼C(jī)模型:
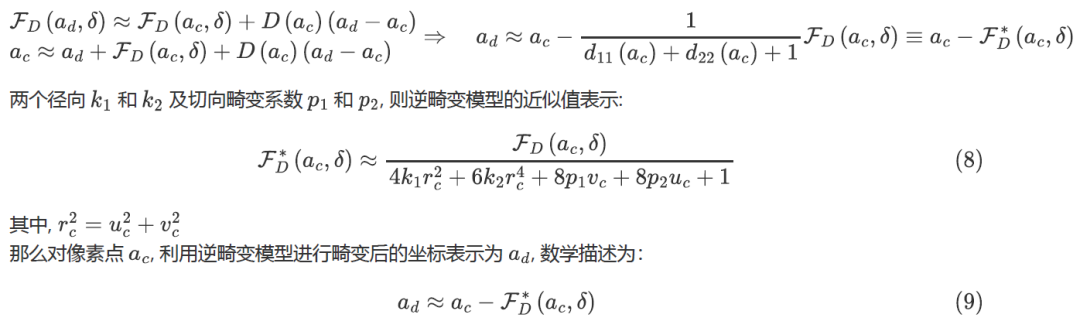
畸變矯正:
由(4)可得:
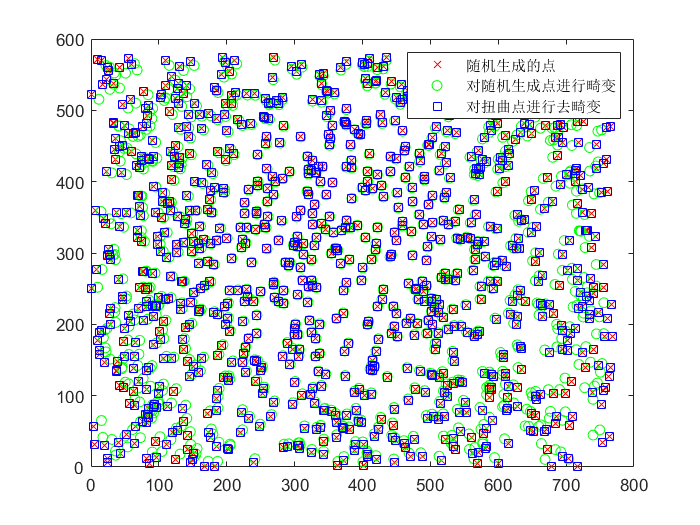
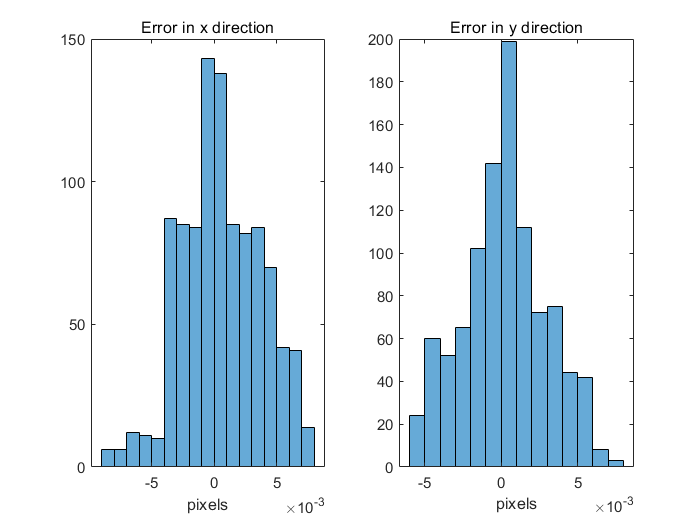
未矯正坐標(biāo)和扭曲坐標(biāo)之間的差異可用直方圖表示,表明誤差小于0.01像素。
參考文獻(xiàn): [1]K. Kanatani,Geometric computation for Machine Vision, Oxford: Clarendon Press, 1993. 本文僅做學(xué)術(shù)分享,如有侵權(quán),請(qǐng)聯(lián)系刪文。 計(jì)算機(jī)視覺(jué)精品課程推薦: 1.面向自動(dòng)駕駛領(lǐng)域的多傳感器數(shù)據(jù)融合技術(shù)2.徹底搞透視覺(jué)三維重建:原理剖析、代碼講解、及優(yōu)化改進(jìn)3.國(guó)內(nèi)首個(gè)面向工業(yè)級(jí)實(shí)戰(zhàn)的點(diǎn)云處理課程4.激光-視覺(jué)-IMU-GPS融合SLAM算法梳理和代碼講解5.徹底搞懂視覺(jué)-慣性SLAM:基于VINS-Fusion正式開(kāi)課啦6.徹底搞懂基于LOAM框架的3D激光SLAM: 源碼剖析到算法優(yōu)化7.徹底剖析室內(nèi)、室外激光SLAM關(guān)鍵算法原理、代碼和實(shí)戰(zhàn)(cartographer+LOAM +LIO-SAM) 干貨領(lǐng)取: 1. 在「3D視覺(jué)工坊」公眾號(hào)后臺(tái)回復(fù):3D視覺(jué),即可下載 3D視覺(jué)相關(guān)資料干貨,涉及相機(jī)標(biāo)定、三維重建、立體視覺(jué)、SLAM、深度學(xué)習(xí)、點(diǎn)云后處理、多視圖幾何等方向。 2. 在「3D視覺(jué)工坊」公眾號(hào)后臺(tái)回復(fù):3D視覺(jué)github資源匯總,即可下載包括結(jié)構(gòu)光、標(biāo)定源碼、缺陷檢測(cè)源碼、深度估計(jì)與深度補(bǔ)全源碼、點(diǎn)云處理相關(guān)源碼、立體匹配源碼、單目、雙目3D檢測(cè)、基于點(diǎn)云的3D檢測(cè)、6D姿態(tài)估計(jì)源碼匯總等。 3. 在「3D視覺(jué)工坊」公眾號(hào)后臺(tái)回復(fù):相機(jī)標(biāo)定,即可下載獨(dú)家相機(jī)標(biāo)定學(xué)習(xí)課件與視頻網(wǎng)址;后臺(tái)回復(fù):立體匹配,即可下載獨(dú)家立體匹配學(xué)習(xí)課件與視頻網(wǎng)址。 重磅!3DCVer-學(xué)術(shù)論文寫作投稿?交流群已成立 掃碼添加小助手微信,可申請(qǐng)加入3D視覺(jué)工坊-學(xué)術(shù)論文寫作與投稿?微信交流群,旨在交流頂會(huì)、頂刊、SCI、EI等寫作與投稿事宜。 同時(shí)也可申請(qǐng)加入我們的細(xì)分方向交流群,目前主要有3D視覺(jué)、CV&深度學(xué)習(xí)、SLAM、三維重建、點(diǎn)云后處理、自動(dòng)駕駛、多傳感器融合、CV入門、三維測(cè)量、VR/AR、3D人臉識(shí)別、醫(yī)療影像、缺陷檢測(cè)、行人重識(shí)別、目標(biāo)跟蹤、視覺(jué)產(chǎn)品落地、視覺(jué)競(jìng)賽、車牌識(shí)別、硬件選型、學(xué)術(shù)交流、求職交流、ORB-SLAM系列源碼交流、深度估計(jì)等微信群。 一定要備注:研究方向+學(xué)校/公司+昵稱,例如:”3D視覺(jué)?+ 上海交大 + 靜靜“。請(qǐng)按照格式備注,可快速被通過(guò)且邀請(qǐng)進(jìn)群。原創(chuàng)投稿也請(qǐng)聯(lián)系。
▲長(zhǎng)按加微信群或投稿
▲長(zhǎng)按關(guān)注公眾號(hào) 3D視覺(jué)從入門到精通知識(shí)星球:針對(duì)3D視覺(jué)領(lǐng)域的視頻課程(三維重建系列三維點(diǎn)云系列結(jié)構(gòu)光系列、手眼標(biāo)定、相機(jī)標(biāo)定、orb-slam3知識(shí)點(diǎn)匯總、入門進(jìn)階學(xué)習(xí)路線、最新paper分享、疑問(wèn)解答五個(gè)方面進(jìn)行深耕,更有各類大廠的算法工程人員進(jìn)行技術(shù)指導(dǎo)。與此同時(shí),星球?qū)⒙?lián)合知名企業(yè)發(fā)布3D視覺(jué)相關(guān)算法開(kāi)發(fā)崗位以及項(xiàng)目對(duì)接信息,打造成集技術(shù)與就業(yè)為一體的鐵桿粉絲聚集區(qū),近2000星球成員為創(chuàng)造更好的AI世界共同進(jìn)步,知識(shí)星球入口: 學(xué)習(xí)3D視覺(jué)核心技術(shù),掃描查看介紹,3天內(nèi)無(wú)條件退款
?圈里有高質(zhì)量教程資料、可答疑解惑、助你高效解決問(wèn)題 覺(jué)得有用,麻煩給個(gè)贊和在看~?? |










工坊小助理微信.jpg.jpg")

【本文地址】